
Monday, August 21, 2006
The rolling bot
 Ralph Hollis is a mobile robotics researcher.
Ralph Hollis is a mobile robotics researcher.Ralph Hollis is convinced that dynamically stable robots have more potential for integration into human environments than simply stables robots, also called "robots with legs".
And this is cool, in addition to the fact that we wonder where he could get this idea, it allows to robotics-fans to discover a robot moving on a simple ball.
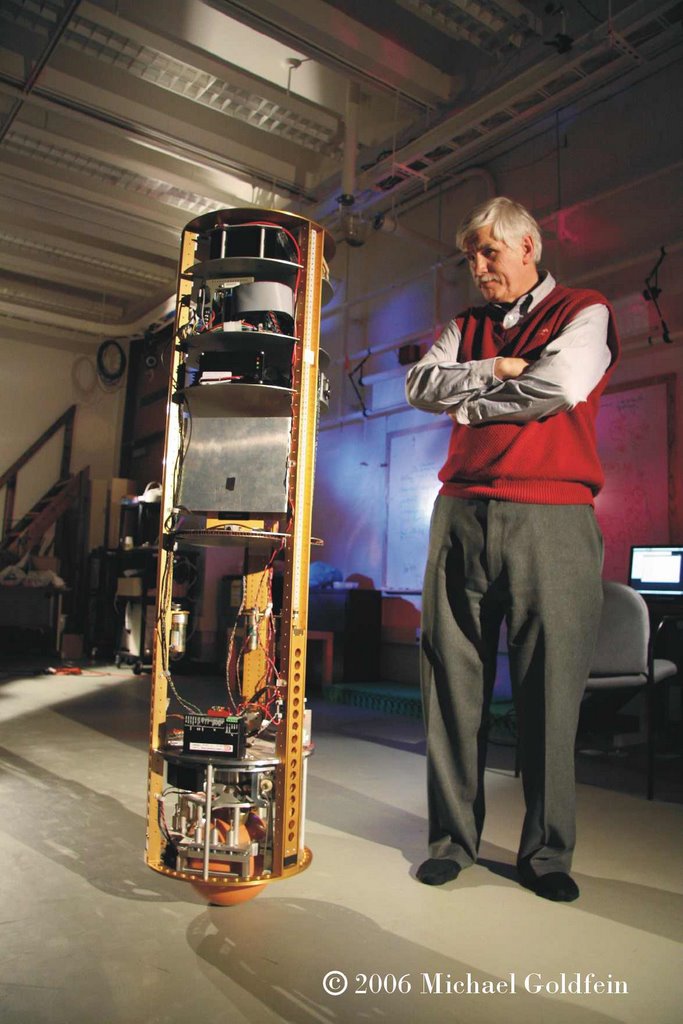
Ballbot - it's obviously its name - is about the height and width of a person, weighs about 95 pounds, and balances and moves on a single urethane-coated metal sphere.
Main advantages: it can maneuver in small spaces because of its long and thin shape and because it does not have to face the direction it intends to move before it does so. And as opposed to what one can think, it's more stable on a slope than the traditional robots.
Internal sensors provide balancing data to an onboard computer, which uses the information to activate rollers that mobilize the ball on which it moves
Adding a head and arms could help it further in rotation and balance, but for Ralph Hellis, there are many hurdles to overcome: responding to unplanned contact with its surroundings, planning motion in cluttered spaces, and safety issues...
When Ballbot is not in operation, he stands on 3 legs which makes in fact a very pretty rack.
Source: The Robotics Institute, last friday.
Another picture here and another here.
Labels: exploits
archives >> April - March - February - January -December - November - October - September - August - July - June - May
Powered by Stuff-a-Blog
une page au hasard
![]()